Force Control in Humanoid Robot Joints: Why It Matters and How It Works
From Position Control to Force Control
Most robot joints operate in position control mode — the controller commands a target angle, and the actuator moves to it. This works for repetitive industrial tasks where the environment is predictable. But humanoid robots operate in unstructured environments alongside people. A position-controlled arm that collides with a person will keep pushing until it reaches its target angle, regardless of the force applied. Force control solves this by making the joint aware of — and responsive to — the forces acting on it.
Torque Sensing Approaches: Sensor-Based vs Sensorless
There are two main methods for estimating joint torque:
| Method | How It Works | Accuracy | Cost | Typical Use |
|---|
| Current-based (sensorless) | Estimates torque from motor phase current using KT calibration | ±5–10% | No additional hardware | Basic collision detection, cost-sensitive applications |
| Torque sensor (sensor-based) | Measures actual output torque via strain gauge or other sensor at the reducer output | ≤0.5% FS | Higher (sensor + signal conditioning) | Compliant manipulation, human-robot interaction, precision force tasks |
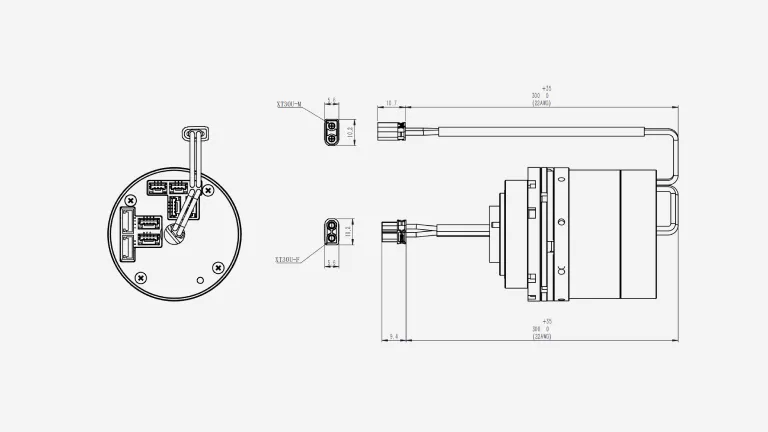
Current-based estimation is simpler and cheaper — the EYOU PH series with KT calibration achieves ±5% accuracy, sufficient for basic safety functions. But for applications requiring precise force modulation — like handing objects to a person, wiping a surface with controlled pressure, or performing physical therapy — a dedicated torque sensor is necessary. The RHU-F integrates this sensor at the harmonic reducer output, providing ≤0.5% FS accuracy at ≥5kHz sampling.
Impedance Control: Making Joints Feel Like Springs
Force-sensing joints enable impedance control, where the joint behaves like a virtual spring-damper system. Two parameters define the behavior:
- Stiffness (K): How much the joint resists displacement. High K = rigid; low K = compliant.
- Damping (D): How much the joint resists velocity. High D = slow, controlled movement; low D = quick, bouncy response.
By adjusting K and D in software hundreds of times per second, a single physical actuator can behave like a rigid strut when supporting weight, then instantly become compliant to absorb an unexpected bump. This is how humanoid robots achieve natural-feeling physical interaction without dedicated mechanical compliance mechanisms.
Joint-Level Force Control Architecture in Humanoid Robots
In a typical humanoid robot, force control operates at multiple levels:
- Joint level: Each actuator runs its own torque control loop at high frequency (≥1kHz). The RHU-F’s 5kHz sensor sampling supports this.
- Limb level: A limb controller coordinates multiple joints to achieve a desired end-effector force or compliance behavior (e.g., Cartesian impedance control).
- Whole-body level: A central controller balances all joints to maintain posture while interacting with external forces (e.g., standing while being pushed).
The joint-level torque loop is the foundation. If the torque sensor is slow, inaccurate, or introduces lag, the higher-level controllers cannot achieve stable force control. This is why sensor specifications like sampling frequency and accuracy matter at the actuator level — they set the ceiling for what the robot can achieve in force-controlled tasks.
Practical Applications of Force-Controlled Humanoid Joints
- Safe human-robot interaction: Detecting and limiting contact forces when operating near people
- Object handover: Sensing grip force and releasing when the person pulls
- Surface contact tasks: Wiping, polishing, or assembly with controlled contact pressure
- Physical therapy and rehabilitation: Providing adjustable resistance during exercises
- Teleoperation with force feedback: Transmitting contact forces back to the operator for remote manipulation
These applications share a common requirement: the joint must sense real-time output torque accurately enough to modulate its behavior based on external forces. This is the core value proposition of the RHU-F force-control variant within the humanoid robot joint actuator ecosystem.