Planetary Gear Actuators in Humanoid Robots: Engineering Trade-Offs for Lower-Body Joints
Why Lower-Body Joints Are Different from Upper-Body Joints
Upper-body joints on a humanoid robot — shoulders, elbows, wrists — operate in relatively predictable motion profiles. They position tools, manipulate objects, and perform gestures. The loads are moderate, speeds are low, and the dominant requirement is positioning accuracy.
Lower-body joints face a fundamentally different challenge. During walking, the knee joint experiences torque spikes every time the foot strikes the ground. During running, these spikes can reach 3–5x the static load. During stair climbing, the hip joint must produce sustained high torque while simultaneously rotating through a large angle. These joints must absorb repeated mechanical shocks without degrading, maintain stable torque output under rapidly changing loads, and do all of this thousands of times per hour.
This is why humanoid robot engineers consistently choose planetary gear actuators for lower-body joints and harmonic gear actuators for upper-body joints. The two gear types have complementary strengths.
Planetary vs Harmonic: A Side-by-Side Comparison for Robot Joints
| Parameter | Planetary (RP Series) | Harmonic (PHU/RHU Series) |
|---|
| Backlash | ≤12 arcmin | ≤15 arcsec |
| Torque density | Higher (multi-tooth load sharing) | Lower per unit weight |
| Impact resistance | Excellent (distributed load) | Moderate (flexspline stress concentration) |
| Positioning accuracy | Moderate | Very high |
| Rated service life | >3,000h | >8,000–10,000h |
| Noise | <65dB | <60dB |
| Typical joint application | Hip, knee, ankle | Shoulder, elbow, wrist |
Neither type is universally better. The right choice depends on the joint’s specific demands. Many humanoid robot designs use both: EYOU Robot’s RP planetary series for lower-body power joints and PHU/RHU harmonic series for upper-body precision joints.
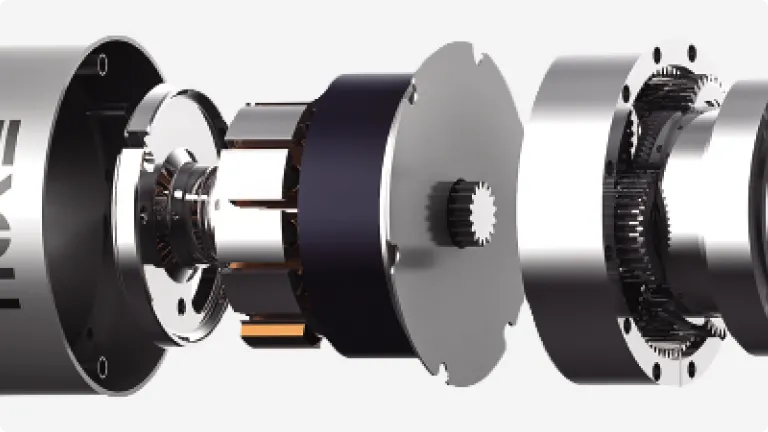
Understanding Reduction Ratio in Planetary Actuators
The RP series uses relatively low reduction ratios (19.53:1 to 25:1) compared to harmonic joints (50:1 to 160:1). This is a deliberate design choice for humanoid locomotion:
- Higher output speed: Lower ratios allow higher joint angular velocity, essential for fast leg swings during walking and running. The RP series achieves 115–150 rpm at the output — significantly faster than harmonic joints at comparable motor speeds.
- Better backdrivability: Lower ratios mean less mechanical resistance to external forces. If a humanoid robot trips or is pushed, a more backdrivable leg joint can yield to the external force rather than transmitting the full shock load to the gear train. This protects both the gear mechanism and the robot’s structural frame.
- Trade-off — lower torque multiplication: Less gear reduction means the motor itself must produce more torque. The RP series compensates with 48V high-power motors optimized for high continuous current.
Ground Reaction Force and Joint Torque Demand
When a humanoid robot’s foot strikes the ground during walking, the ground reaction force (GRF) creates torque demands at every lower-body joint. The magnitude depends on walking speed, robot mass, and gait profile. A rough engineering estimate for a 50kg humanoid robot walking at 1.2 m/s:
| Joint | Peak Torque During Walking | Peak Torque During Running | RP Model |
|---|
| Hip (sagittal) | 25–35 N.m | 50–70 N.m | RP70H / RP90S |
| Knee | 15–25 N.m | 40–60 N.m | RP70L / RP70H |
| Ankle | 20–30 N.m | 35–50 N.m | RP70L / RP70H |
These are approximate values and vary significantly with gait design, foot geometry, and control strategy. The key takeaway: lower-body joints must handle peak torques that are 2–3x the rated torque during dynamic motion. This is why the RP series specifies peak torque ratings (up to 120 N.m on RP90S) that are 3x the rated torque — the actuator must survive these transient spikes without gear damage.
Thermal Considerations at 48V
The RP series operates at 48V — higher than the 24–36V range common in many lightweight actuators. Higher voltage enables higher power delivery at lower current, reducing I²R copper losses in the motor windings. This is important for lower-body joints that run at high duty cycles during locomotion.
However, the RP series has a tighter operating temperature range (-20°C to 45°C) compared to harmonic series (-20°C to 60°C). This is because planetary gear sets generate more heat from tooth friction at high speeds than harmonic drives. Engineers should account for the thermal environment inside the robot’s leg structure — particularly when multiple RP actuators are stacked in close proximity at the hip-knee-ankle chain — and ensure adequate heat dissipation paths to the outer housing or structural frame.