Lightweight Actuator Design: How Weight Affects Robot Performance
Why Joint Weight Matters More Than You Think
In a multi-joint robot arm or humanoid limb, each joint actuator must move not only the payload at the end of the limb, but also every joint and link segment beyond it. A 200g increase in weight at the elbow means the shoulder actuator must work harder during every motion cycle. This cascading effect means that reducing weight at distal joints (those farthest from the base) has a disproportionately large impact on the overall system’s energy consumption, speed, and thermal load.
For a 6-DOF robot arm, a rough rule of thumb: every 100g added at the wrist joint increases the required shoulder torque by approximately 0.5–1.0 N.m depending on arm length. Over thousands of motion cycles per day, this adds up to significantly higher energy consumption and faster motor heating.
Where the Weight Goes: Anatomy of a Joint Actuator
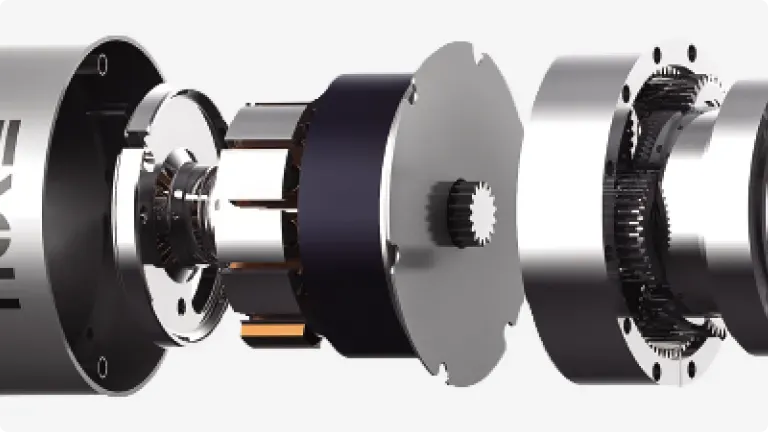
A typical integrated harmonic joint actuator consists of:
| Component | Typical Weight Share | PHA Approach |
|---|
| Motor (stator + rotor) | 30–40% | High-density frameless torque motor, optimized winding |
| Harmonic reducer | 25–35% | Steel flexspline and circular spline (no substitute for strength) |
| Encoder(s) | 3–5% | Dual 16-bit magnetic encoders (compact, no optical components) |
| Driver board | 5–10% | Integrated FOC driver, minimal board footprint |
| Housing | 15–25% | Aluminum alloy, wall thickness optimized via FEA |
| Brake | 5–15% | Eliminated entirely in PHA series |
The harmonic reducer itself (flexspline + circular spline + wave generator) is steel and cannot be meaningfully lightened without compromising gear life. So the main levers for weight reduction are: removing the brake, optimizing housing wall thickness, and using compact encoder and driver designs.
The Inertia Problem: Weight at the Joint vs Weight at the Base
Reflected inertia — the effective inertia that the motor sees — scales with the square of the distance from the rotation axis. A component 0.3m from the joint axis contributes 9 times more reflected inertia than the same component at 0.1m. This is why proximal actuation (mounting heavy motors close to the body or base) is a common design strategy in humanoid robots and lightweight arms.
But in integrated joint actuators, the motor sits at the joint itself. This means the actuator’s own weight is the single largest contributor to reflected inertia at that joint. Reducing actuator weight — as the PHA series does by eliminating the brake and optimizing the housing — directly reduces reflected inertia and improves dynamic responsiveness.
Battery Life and Joint Weight: The Mobile Robot Trade-Off
For mobile robots (humanoids, quadrupeds, wheeled service robots), joint actuator weight has a direct relationship with battery life. Heavier joints require higher motor currents during acceleration, and the total energy budget for a motion cycle scales roughly linearly with the mass being moved. In a humanoid robot with 20+ joints performing continuous locomotion, a 10% reduction in total actuator mass can extend operating time by a measurable margin — particularly for battery-powered platforms where every watt-hour counts.
This is the core value proposition of the PHA series: by trading off the brake and using 16-bit instead of 19-bit encoders, the PHA achieves a lighter package that directly translates to longer battery life and faster dynamic response in weight-constrained applications.
When Lightweight Is Not the Right Choice
Lightweight design involves trade-offs. The PHA series is not the best fit when:
- Gravity compensation is needed: Joints that must hold position against gravity when power is cut (e.g., vertical-axis joints holding a heavy payload) need a brake. Use PHU or RHU with brake option.
- Maximum encoder resolution is required: Precision inspection, laser cutting, or micro-assembly may require 19-bit resolution. Use PHU.
- Force control is required: Applications needing torque sensor integration should use RHU-F.
- High reduction ratio flexibility is needed: PHA uses a fixed 101:1 ratio. For 50:1–160:1 selection, use PHU or RHU.
Selecting the right series comes down to identifying which constraint dominates: weight (PHA), versatility (PHU), humanoid-specific wiring and force control (RHU), or high-torque impact resistance (RP/PP planetary).